| I. Research content
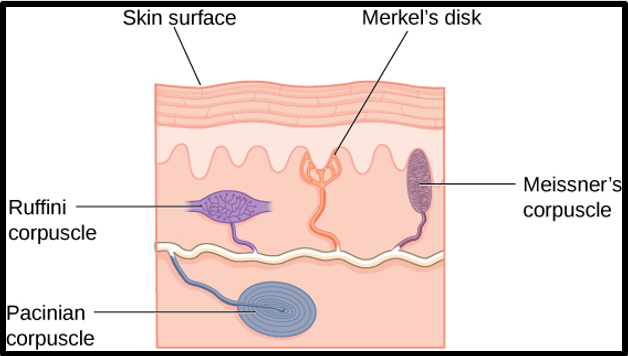
Principle of Haptic Feedback: Based on a single ultrasonic transducer, we have assembled a small emitter array module. The amplitude of the ultrasonic sound pressure is controlled by adjusting the DC voltage, generating controllable ultrasonic haptic points in the air to achieve non-contact haptic feedback. The ultrasonic transducer array can control each ultrasonic wavefront to reach the desired haptic point location simultaneously by inputting square wave signals of different phases to each emitter. At the convergence point, constructive interference forms a focal point and shear waves on the skin surface, displacing skin tissue and triggering subcutaneous mechanoreceptors to induce a tactile sensation in the human body. |
||
Figure 1. Ultrasound convergence diagram |
Figure 2. Skin tactile receptor |
|
|
System Design: The hardware architecture of the ultrasonic haptic feedback system includes a Field Programmable Gate Array (FPGA), shift registers, signal amplifiers, and an ultrasonic transducer array.
This architecture supports the efficient operation and flexibility of the ultrasonic haptic feedback system, enabling its application in diverse environments. Because the human body cannot perceive continuous waves at frequencies of tens of thousands of Hz, the high-frequency ultrasonic waves at the focal point need to be modulated to create a tactile sensation on the skin. This modulation converts the high-frequency ultrasound into lower-frequency amplitude-modulated waves for haptic feedback. Our laboratory employs both Amplitude Modulation (AM) and Spatio-Temporal Modulation (STM) techniques to create single-point and multi-point feedback in space, establishing tactile sensations for virtual objects of various shapes. |
||
|
|
||
|
Figure 3. Hardware of ultrasonic haptic feedback system. |
||